Las primitivas básicas: punto, recta, plano, .... hiperplano! (2/6)
En una dimensión, donde solo existe el eje x, el único elemento es el punto, x=a, donde a es un valor real. Por ejemplo, x=0, que es el punto que se encuentra en el centro de la recta real. Casualmente, este punto separa en dos la recta: deja a un lado los puntos de la izquierda (x<0) y al otro lado los puntos de la derecha (x>0)

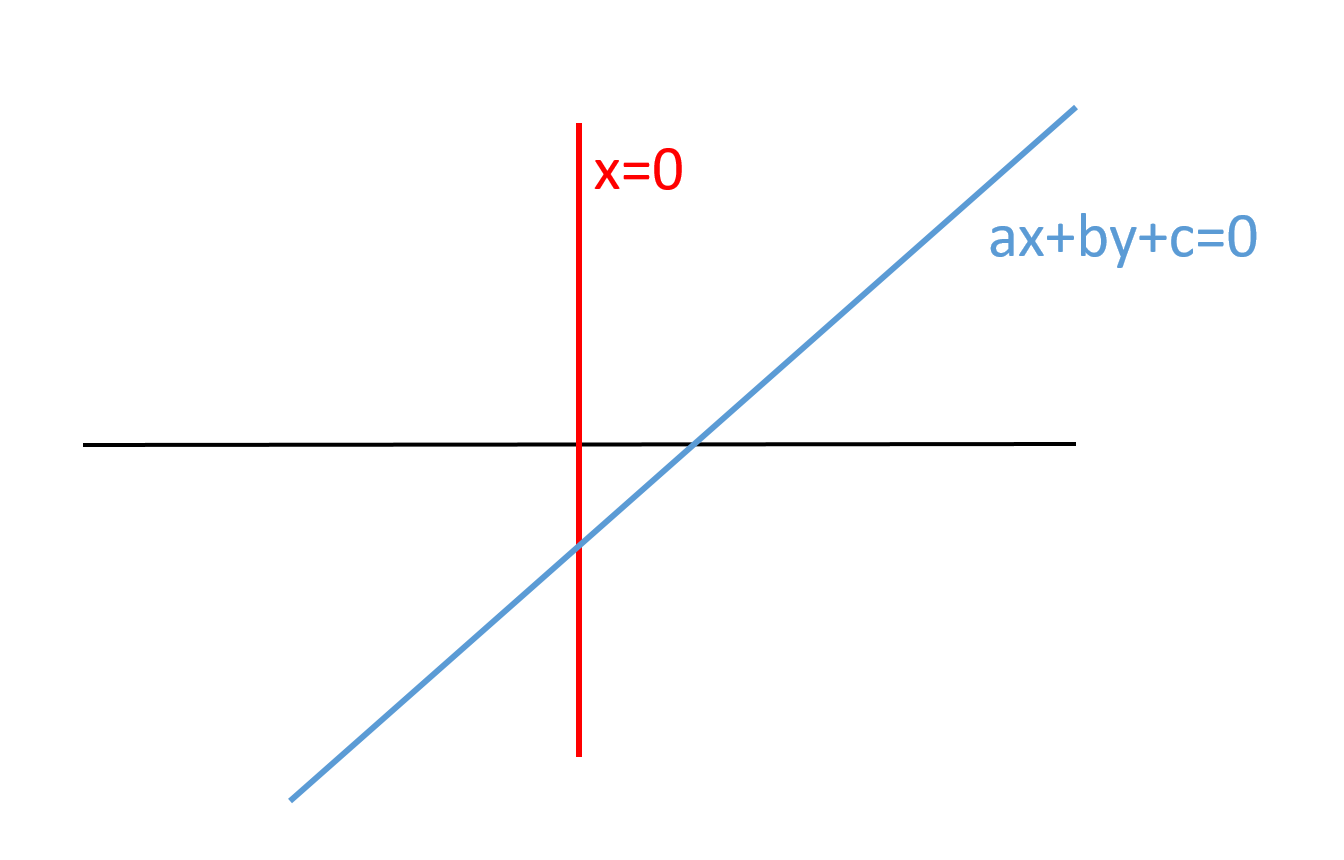
En 2D pasamos a tener dos ejes, x,y. Ahora un punto ya tiene dos coordenadas, P=(x,y), y una recta es una línea que une dos puntos y se extiende hasta el infinito. Al igual que el punto en una dimensión separaba el espacio 1D en dos mitades, ocurre lo mismo en 2D: una recta corta el espacio 2D en dos mitades, una a cada lado de la recta. Estamos acostumbrados a ver una recta con la ecuación explícita y=ax+b, donde a es la pendiente de la recta, y b es el corte de la recta con el eje vertical. Pero esta forma de representación tiene sus desventajas. Por ejemplo, no puedes representar una recta vertical, como por ejemplo x=5. Así que es preferible usar la forma general ax+by+c = 0.
Vayamos ahora al espacio 3D, donde aparece un tercer eje, la z, perpendicular a los dos ejes anteriores, x,y. Aquí seguimos teniendo puntos y rectas, y ahora también tenemos un plano, que viene dado por la ecuación ax+by+cz+d=0. Al igual que el punto y la recta en 1D y 2D respectivamente, un plano divide el espacio 3D en dos mitades, una a cada lado del plano.

Siguiendo con la curiosidad de antes, la ecuación x=0, que antes representaba a un punto y a una recta en 1D y 2D respectivamente, ahora en un espacio 3D representa un plano, ya que son todos los puntos con la x igual a cero, para cualquier valor de las coordenadas y,z. En la figura anterior, el plano x=0 sería la pared que se ve al fondo, también llamado plano yz.
Y llegamos al espacio 4D, añadiendo un cuarte eje, w, que es perpendicular a los tres anteriores, x,y,z. Ya este simple hecho empieza a resultarnos extraño de ver. En la figura anterior, si quisiéramos añadir un cuarto eje, no sabríamos hacia dónde hacerlo. No podemos. Pero está ahí, aunque no lo veamos. Matemáticamente sí es más fácil de ver. El vector unitario w tiene por coordenadas [0, 0, 0, 1], y al multiplicarlo escalarmente por cualquier vector paralelo a alguno de los otros 3 ejes, claramente su resultados es cero, señal inequívoca de que son perpendiculares.
En este espacio 4D seguimos teniendo puntos, rectas y planos, y además nos aparece un nuevo elemento llamado hiperplano. Siguiendo el mismo desarrollo que antes, la ecuación del hiperplano viene dada por ax+by+cz+dw+e=0. Es decir, todos los elementos que hemos ido introduciendo tienen su ecuación como una combinación lineal de todas sus coordenadas, sea cual sea su espacio. Del mismo modo que antes, un hiperplano divide el espacio 4D en dos mitades, una a cada lado.
Pero ojo!!, un hiperplano no es un plano en 4D, de la misma forma que un plano no es una recta en 3D. Para entenderlo mejor, cojamos el hiperplano x=0 (que por cierto, curiosamente la misma ecuación que en 1D era un punto, en 2D era una recta, y en 3D era un plano). El hiperplano x=0 está formado por todos los puntos con la x igual a cero, para cualquier valor de las coordenadas y,z,w. Por tanto esto significa que un hiperplano es un espacio 3D, o un volumen entero!!
Otra forma mejor de verlo es utilizando las ecuaciones paramétricas de cada elemento. Pensemos primero en una recta, y concretamente la recta x=0 en 2D por usar un ejemplo fácil. Decíamos antes que esta recta estaba formada por todos los puntos que tenían la x igual a cero, y cualquier valor real de y. Esto es lo que se llama un grado de libertad. Es decir, la x está fija a cero, pero la y puede tomar cualquier valor con total libertad sin restricciones.
Si ahora cogemos el caso de una recta cualquiera genérica, ésta viene dada por la expresión P(t)=P+tu, donde P es un punto conocido de la recta (uno cualquiera), u es el vector que indica la dirección de la recta, y t es valor del parámetro (por eso se llama ecuación paramétrica), que puede tomar cualquiera valor real entre menos infinito y más infinito. Dándole valores al parámetro t, nos podemos mover a cualquier punto de la recta: para t=0 estamos en el punto P, para t positivos nos movemos en la dirección del vector u, y para puntos negativos nos movemos hacia atrás. Cuanto más valor tenga t, más lejos del punto P nos colocaremos. Y precisamente esta opción de poder jugar con el valor de t y movernos a lo largo de la recta es el grado de libertad que hablábamos antes.

El concepto de recta así es un elemento que sólo tiene un único grado de libertad, y su expresión es la misma para cualquier número de dimensiones del espacio en el que se encuentra (obviamente deben haber un mínimo de dos dimensiones). En 3D, el punto P y el vector u tendrán 3 componentes, mientras que en 4D, ambos tendrán 4 componentes. Pero el valor de t será siempre un único número real.
Vamos ahora con el plano. Empecemos como antes por un caso fácil. El plano x=0 en 3D, definido por todos los puntos con la coordenada x igual a cero, y cualquier valor para las coordenadas y,z. En esta ocasión, tenemos dos grados de libertad. Para describir un plano genérico necesitamos esta vez un punto P y dos vectores, u,v, contenidos en el plano (normalmente perpendiculares entre sí, para hacerlo más fácil). Así la ecuación paramétrica del plano se convierte en P(t,s)=P+tu+sv, donde t,s son los dos parámetros que nos permiten movernos por el plano, y representan sus dos grados de libertad.

Y finalmente llegamos al hiperplano. Volvemos a coger el caso fácil, el hiperplano x=0, formado por todos los puntos con la x igual a cero, y las otras coordenadas con cualquier valor posible, lo que nos da tres grados de libertad para movernos por el hiperplano. Eso define un espacio 3D entero!! Para describir un hiperplano genérico, necesitaremos un punto conocido P y tres vectores ortogonales, u,v,w, (perpendiculares entre sí) que nos dan esos tres grados de libertad. De esta forma, la ecuación de un hiperplano pasa a ser P(t,s,r)=P+tu+sv+rw, donde los tres parámetros t,s,r pueden tomar cualquier valor.



Comentarios
Publicar un comentario